“手术时间一长,医生难免会手抖。手术机器人能够过滤抖动,避免给患者带来的威胁。”北京和睦家医院医生朱刚坐在电脑边,回放自己操作达芬奇机器人完成的手术:两只微型机械臂从腹部小孔进入患者腹腔内,切除肿瘤。
与完全自动化的工业机器人不同,达芬奇依然需要医生来操作。患者躺在手术台上,朱刚坐在机器人控制台上,紧盯着成像系统,这个系统可以清晰地将手术部位放大数倍,左右手分别操纵着控制台上的两个手柄,再辅以脚下的控制踏板,指挥机械臂完成手术。
自1996年问世以来,在过去20年的时间里,达芬奇经过几代更迭,一度成为医疗机器人的代名词。如今,更多类型的机器人开始出现,在各个医疗环节辅助医护人员更好地完成工作。
目前的医疗机器人市场中,欧美企业占据了主要的市场份额。中国医疗机器人仍处于研发或临床试验阶段,还未实现医疗机器人产品规模化,在医疗机构的普及率也较低,但正努力赶上。
手术机器人先行
早在1985年,美国洛杉矶医院的医生在Puma560工业机器人辅助下完成了神经外科脑部活检手术,这是首次将机器人技术运用于外科手术中。
此后医疗机器人发展出诸多种类。北京航空航天大学机器人研究所王田苗院士曾撰文介绍,将已经上市的医疗机器人按照功能和用途分为若干类,包括神经外科机器人、骨科机器人、腹腔镜机器人、血管介入机器人、假肢和外骨骼机器人、辅助康复机器人、医院服务机器人和胶囊机器人等。
达芬奇是商业化最为成功的医疗机器人之一,主要用于心脏外科、泌尿外科、胸外科、肝胆胰外科、胃肠外科、妇科等相关的微创腹腔镜手术。和睦家医疗CEO李碧菁早年参与将达芬奇引入中国。她告诉《财经》记者,截至2016年二季度,全球已经配置达芬奇超过3700多台,其中2474台配置在美国,欧洲和亚洲紧随其后,完成手术数百万台。
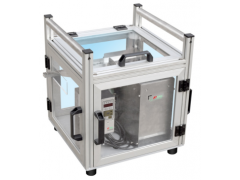
达芬奇机器人由三部分组成,医生操作系统、三个器械臂和一个镜头臂组成的床旁机械臂系统、三维视频成像系统。在手术过程中,朱刚只需要操作手柄,控制机械臂进入腹腔中进行手术;成像系统提供如同开放直视效果的高清三维手术视野,帮助他进行判断。
朱刚和很多外科医生能够举出达芬奇的一系列优点。在机器人辅助下,医生可以坐着进行手术,舒适的坐势有利于长时间复杂的手术,是对医生身体的解放。北京理工大学智能机器人研究所博士李浩源介绍,机器人的操作精度由计算机控制,从而过滤因劳累导致的医生手部抖动,减少手术风险。
在机器人协助下,朱刚一个人就可以完成此前一整个电视腔镜手术团队的大部分工作,可以节约更多的人力。
此外,医生借助机械臂进入腹腔进行手术,避免与患者的直接接触,减少感染风险;而且手术切口较小,患者恢复时间自然更快。
截至目前,中国已经配置60台左右达芬奇机器人,主要分布在一线城市和大型医院。由于大型设备采购监管放开,一些沿海发达地区省会和地市级三甲医院也正计划采购手术机器人。
朱刚自己经历过腹腔镜手术对开放式手术的替代,从而对机器人手术颇为看好。在他看来,只要对机器人的操作熟练,可以把更多的手术交给机器人来完成,同时,医生能够不断提升手术速度和精度。“我们现在使用机器人进行前列腺癌手术,耗费时间少于开放式手术。”他说。
李浩源指出,腹腔镜手术机器人一枝独秀有其特殊性,腹腔内部器官生理解剖知识积累较多,腹腔内部相对活动空间加大,承受机器人外部干预幅度较大,风险相对较小。
主要针对脑部的神经外科机器人恰好形成鲜明对照。王田苗指出,“目前上市的神经外科机器人大多采用术前医学图像导航的方式对机器人进行引导定位,脑组织在手术过程中会因颅内压力变化而发生变形和移位,不可避免地引起定位误差。”而脑组织太脆弱,不能承受过度的外部侵入,误差意味着风险。因此,神经外科机器人在辅助手术操作过程中,需要医生结合医学影像反复调适,成为一个需要突破的瓶颈。